In a quiet corner on the platform above the metal workshop, a rocket mock-up made of cardboard and wooden boards has been put on a pair of sawhorses.
It is used as a template for laying up the cable harness connecting the avionics bay to the rocket engine controller (ECU) and the jet vane servos in the business end of the Nexø II.
A part of the harness is connecting the ECU to the various sensors and valves on the tanks, as well as the local controller, valves and sensors in the new DPR (Dynamic Pressure Regulation) section, positioned just below the avionics bay.
As the harness is placed very close to the tank containing the super cold liquid oxygen, the wire insulation is entirely teflon based, as the extreme cold from the tank would make standard PVC insulation brittle and prone to failure.
To keep the harness together, the individual wires are placed inside teflon tubing on the part that traverses the oxygen tank, again because of the extreme cold from the tank.
The harness is still a work in progress.
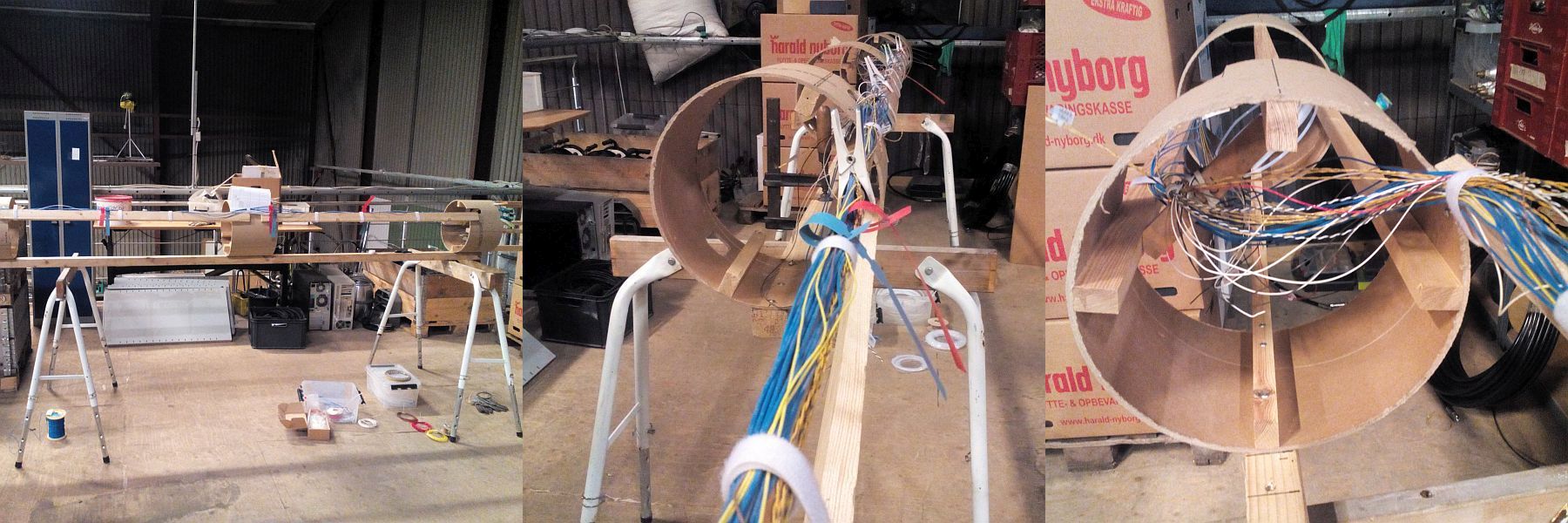
The rocket mock-up with the wire harness being laid up. Photo: Bo Brændstrup.
On the other hand, the wire harness internal to the avionics bay is done. This wire harness connects the avionics units; TM&TC (TeleMetry and TeleCommand) radio, GNC (Guidance and Navigation Computer), GPS Unit and the battery charger/controller box with each other and the connectors for the above mentioned wire harness.
It has been some time in the making, as the specification has had some changes along the way.
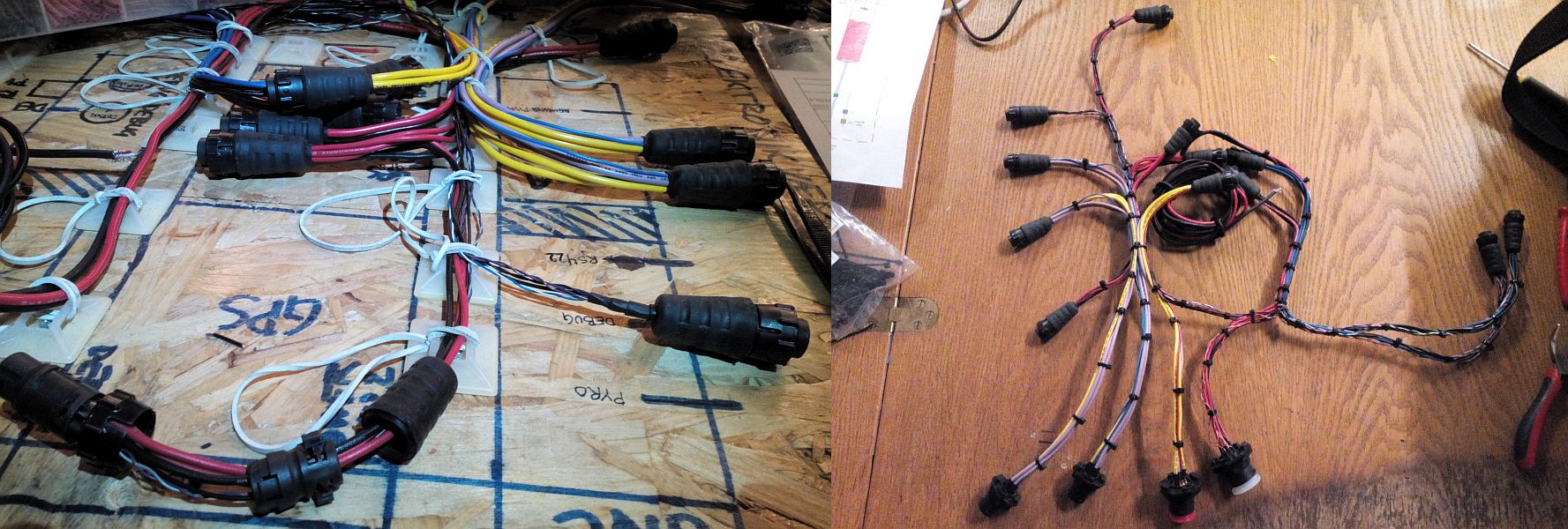
The avionics Bay wire harness. Photo: Bo Brændstrup.
A couple of printed circuit boards have been finished recently. The battery charging circuit has been through several reviews, and after approval and board layout the finished boards were received the week before easter.
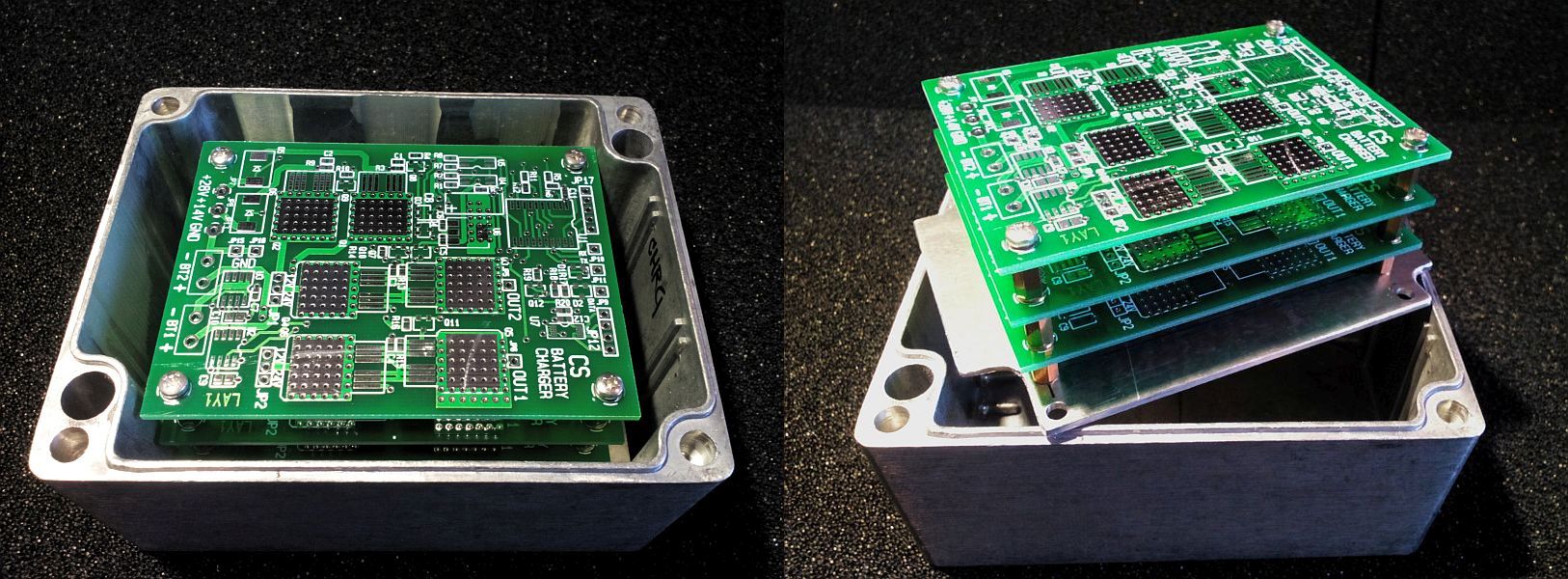
The boards responsible for battery charging and on/off logic. Photo: Bo Brændstrup.
The team responsible for the design of the GPS unit has received a space rated and flight proven GPS receiver from danish satellite company Gomspace, which has enabled them to finalise the GPS unit design. The design involved an interface between two GPS receivers, a barometric pressure sensor and the TM&TC (TeleMetry and TeleCommand) radio. After design approval and CAD layout, the finished boards arrived this past week.
So it is time to power up the pick and place machine and the reflow soldering oven. And then the testing begins!

The board for the GPS unit. Photo: Bo Brændstrup.
Even though our chairman demands tight focus and no dawdling, a couple of stealthy skunkwork projects have been ongoing through winter.
A new version of the Skyview Rig, which overheated and failed miserably last year, is in the works. Liquid cooling has been considered. To ease the stress on the team that is responsible for activating all the high speed cameras on Sputnik just prior to launch, the new rig will incorporate an Arduino, to facilitate « one button, one press » operation.
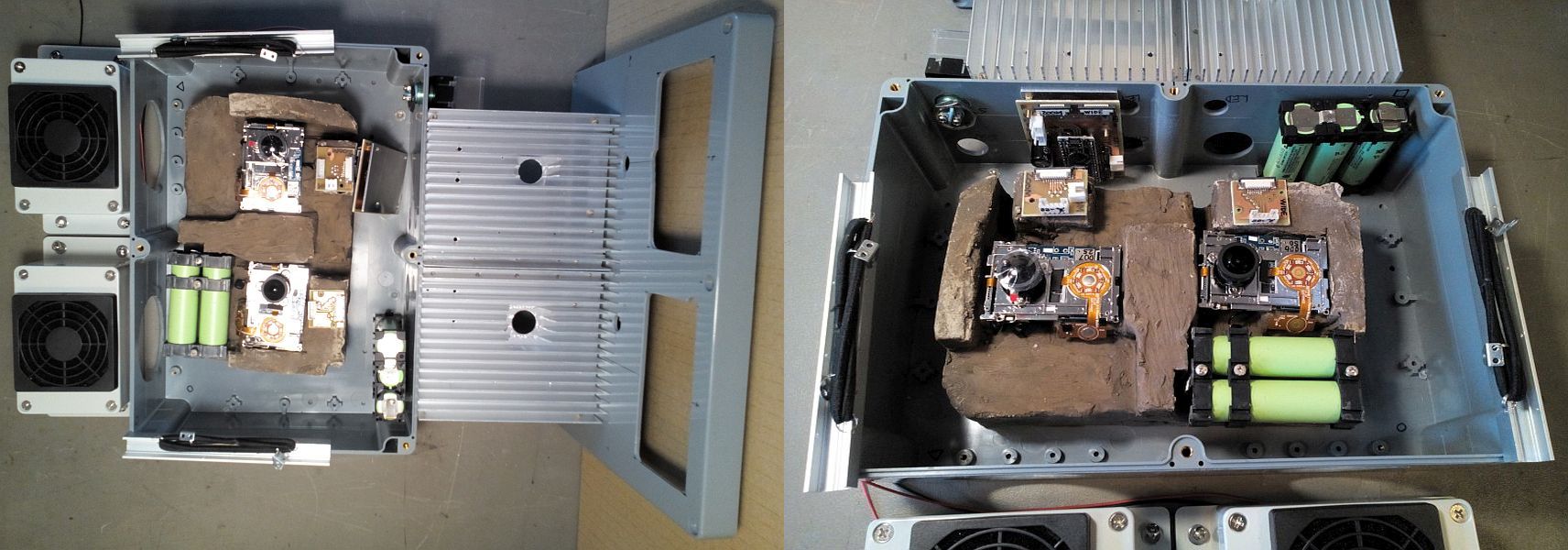
Some of the parts for the new Skyview Rig. Photo: Bo Brændstrup.
A streaming camera to be mounted on the radar mast on Vostok is also in the works. It will provide a panoramic view of Sputnik during launch preparations. It features a gimbal compensating the movements of Vostok to avoid making our viewers seasick. The heading of the camera can be controlled remotely by our streamteam in Copenhagen.
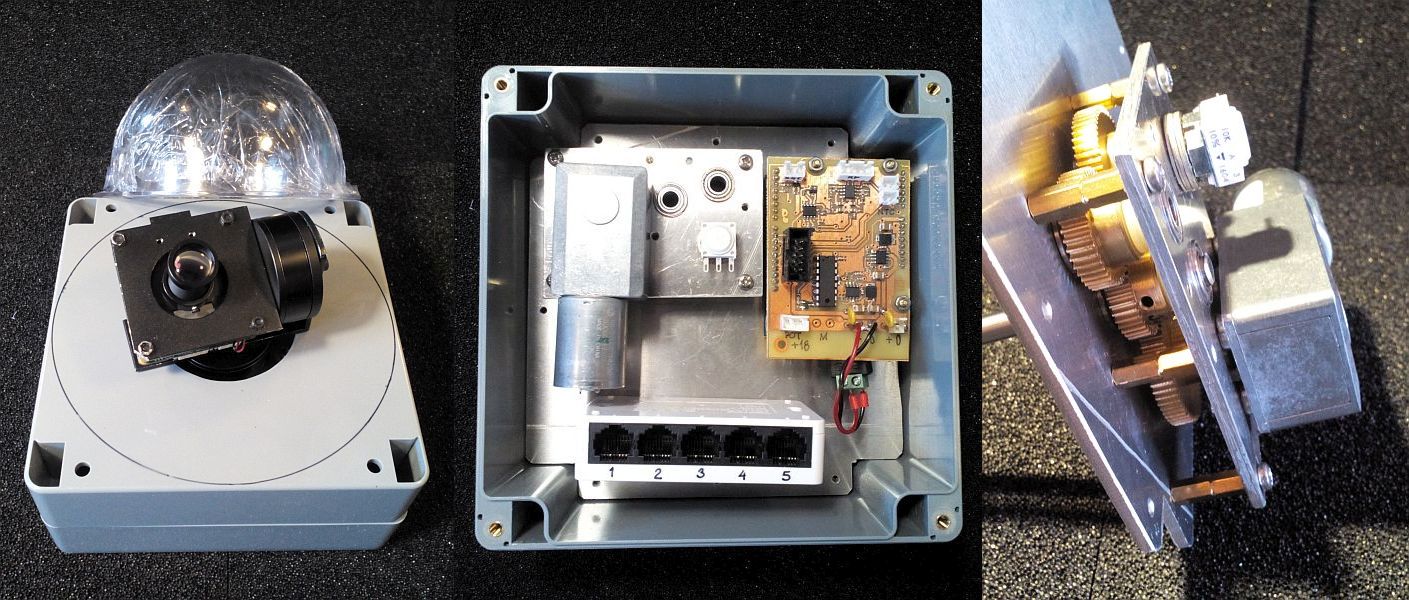
Camera, gimbal, control box and gearbox for the panoramic camera. Photo: Bo Brændstrup.
As the two camera systems are classified as « nice to have », as opposed to « need to have », their completion in time for the launch of Nexø II is not guaranteed. The electronics for the Nexø II rocket has first priority.





5 Comments
Comments are closed.