Dear readers
We completed integration testing of on-board electronics for the Nexø I rocket a couple of weeks ago. Everything worked apart from our GPS Units. It turned out that they are sensitive to the video transmitters frequencies, which is right around 1500 MHz. The GPS units, which are from Piksie and Poxa, could get a fix on the satellites and maintain it if we started the video transmitter subsequently. But they could not regain their fix if they had been interrupted and thus lost their fix, while the transmitter was running.
It’s likely that we lose the GPS fix during the flight of Nexø I. We saw this with Sapphire. Therefore it’s important that they have the opportunity to acquire a new fix, if they were to lose it. Thomas Scherrer has installed some filters on the antennas, which makes the GPS antennas receiving frequency band very narrow and therefore won’t be affected by the video transmitter to the same degree.
Yesterday’s integration test was therefore limited to show that these filters could solve the problem of interference from the video transmitter. And the test proved positive for Poxa GPS. Now there’s no problem in retrieving a fix while the video transmitter is running whether we make a cold or hot start.
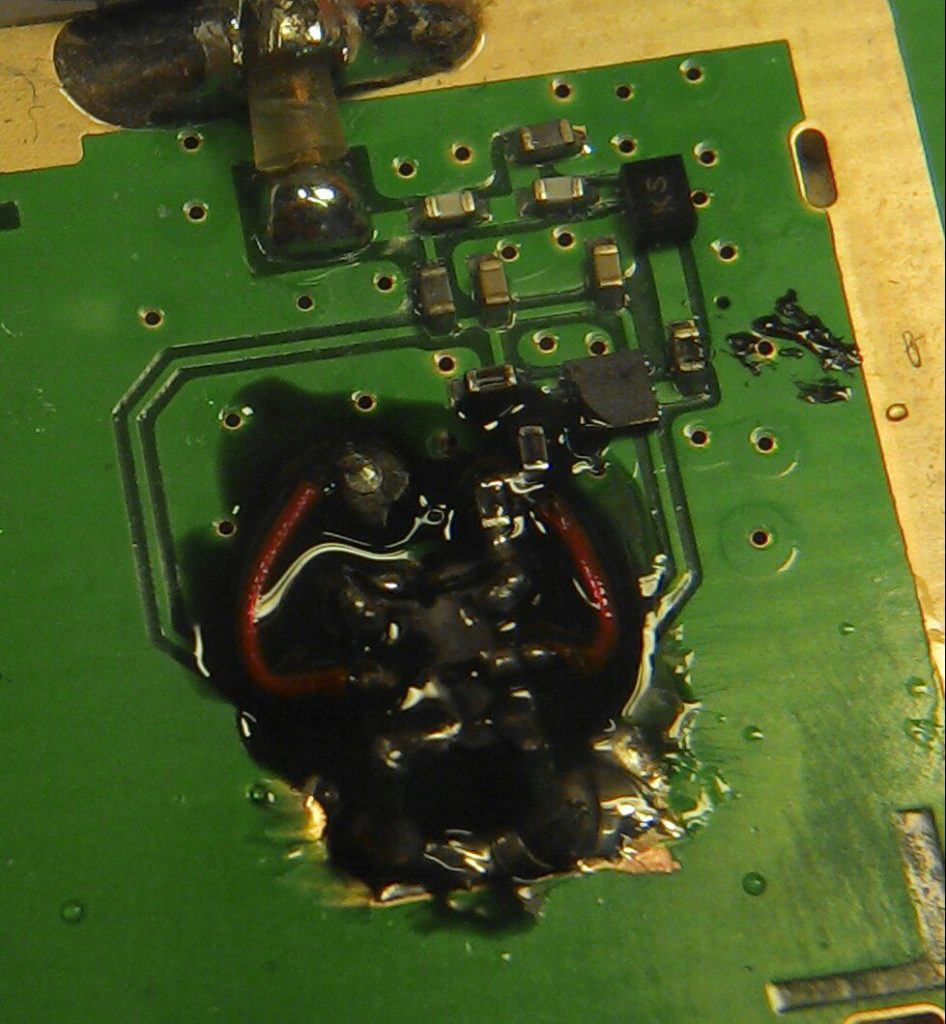
GPS filters mounted by Thomas Scherrer . They are lacquered to isolate the outside world . Photo: T. Scherrer .
But our Piksi GPS made a fuss. We saw some very long delays after cold and hot start until it got a fix. For example, 12 minutes. Cold start means that we turn it completely off while hot start means that we turn the antennas of so the GPS devices loses their fix, but they are still running. That our Piksi didn’t reacquire its fix isn’t related to the filters. We tested with and without filters, with the same result. Also the filters works perfect on the Poxa. Our Piksi is a GPS unit under development, so the next step is to upload a new firmware to determine whether the developers have improved their algorithms on this point. We have a variety of options for replacing this GPS unit with another COTS, such as Copernicus II, Venus or uBlock if the update doesn’t solve the problem.
The overall status concerning on-board electronics for Nexø I:
GPS: as above – we can fly with what we have, but there are a few low-hanging fruit that we try to pick to get to 100%
GNC: Completed integration test and passed 100%
Radiosender: Completed integration test and passed 100%
Video: Completed integration test and passed 100%
EC: Completed integration test and passed 100%
Power: Completed integration test and passed 100%
Along with the cold flow test of Nexø I, we’ll do a systems test before we go to Bornholm.
There will be made many other tests like this GNC swing test to reveal whether the axes are aligned correctly in relation to the IMU and jet vanes.:
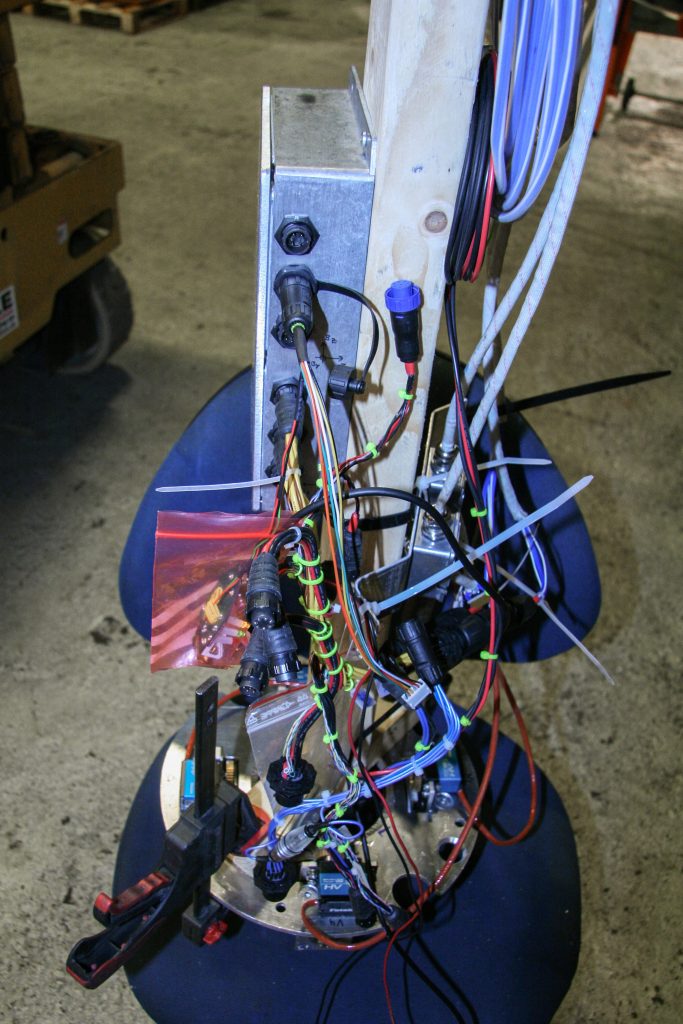
GNC swing test. Photo: Flemming Nyboe
So there is still something to do, but we believe we are on track.
Regards
Steen




