Mission accomplished.
On Saturday, August 4th, We successfully launched the Nexø II rocket from the Baltic Sea.
-

- The full story of the Nexø II mission
-

- Complete webcast of the Nexø II mision
About
The Nexø II rocket us the most advanced rocket build and launched by CS so far. The Nexø rocket class is a technology demonstrator in advance of building the significantly bigger Spica rocket that will take our astronaut to space. Thus, Nexø is an important part of the Spica roadmap and the technology developed and used in the Nexø class will be used in the Spica rocket.
The countless hours put into our 6th mission by our small team of volunteers paid off. The rocket flew in a perfect line up to app. 6500 m, where the nosecone was discarded, and the ballute did its job: Stabilising the rocket, and then deploying the main parachute that carried the rocket down to a gentle splashdown in the sea. The rocket was quickly recovered as planned – and even the nosecone was found. This splash cannot be underestimated: It was the first time we had a rocket land in a parachute, and that with a speed so low that an astronaut would have survived the impact.
Also, the DPR system proved to be as successful as we hoped. This system, that uses a helium tank to maintain a constant pressure in the fuel og oxidizer tanks, paves the way for a rocket that can fly an astronaut all the way to space without the need for extremely complicated turbopumps.
In other words: The Nexø I and II has done their job as concept demonstrators for the systems that now can be scaled up to the much bigger, manrated Spica rocket class:
- Active guidance hardware / software
- Our bi-propellant, liquid fueled rocket engine
- Aerodynamic concept
- Communication between rocket and Mission Control
- Dynamic Pressure Regulation (DPR) tank system
- Material design and production
- Ballute and parachute system
Apart from the systems on the actual rockets, our missions allow us to test and exercise the capabilities that we need to achieve our dream:
- Group organization, leadership and cooperation
- Sailing and using our ships and boats (Not least confirming that our new Mission Control Ship, Bolette Munkholm, is as perfect as we hoped)
- Live stream, communication and fundraising
- Liaison with authorities and partners
It has, as always, been a very hard job to pull it off for us all. We’re unpaid volunteers, doing this in our spare time, driven by a shared dream. But seeing that parachute unfold in the blue sky was worth it all. But we need to thank the people who make all this possible.
You.
It’s your constant support, donations and enthusiasm that made Nexø II fly, and keeps us moving forward. Remember, it’s all crowdfunded by people all over the world, and that’s how we want it to be: To prove that an amateur can fly into space, without government or big business backing. The fuel might be ethanol, but the energy comes from everybody who believes and keep sending money. Thank you.
As soon as we have analysed the data from the mission, we’ll of course provide detailed, in-depth blog posts, while also releasing more photos, infographics and video. Within the next month, we’ll also host a public de-briefing event in Copenhagen.
Design and development
Just as Nexø I the Nexø II rocket was powered by our own BPM5 engine providing a nominal thrust of 5000 N running on ethanol and liquid oxygen. It has a body diameter of 300 mm, a total length of 6.7 m and a dry weight of about 178 kg. With a target filling ratio of 85% propellants it carried 114 kg propellants for a Gross Lift-Off Weight (GLOW) of 292 kg.
-

- A walkthrough of the Nexø II rocket (Part I)
-

- A walkthrough of the Nexø II rocket (Part II)
-

- A walkthrough of the Nexø II rocket (Part III)
Guidance
Nexø II was actively guided by our own custom build Guidance and Navigation Computer (GNC). A set of four graphite jet vanes was used as the Thrust Vector Control system (TVC) commanded by the GNC. The system is identical to the one successfully used on the Nexø I mission. The animation below illustrates the perfect performance of the TVC system on the Nexø I rocket.
-

- Nexø I flight animation
-

- Jet Vanes
-

- Swing test
So what’s new ?
Nexø II is in many aspects identical to Nexø I, we have however implemented a few changes and newcomings:
- Dynamic Pressure Regulation (DPR) including a 6000 standard liter (20 liter @ 300 bar) helium tank
- Problematic LOX tank vent valve changed for cryo compatible model
- LOX tank filling monitored by capacitive gauge
Dynamic pressure regulation
The simplest way to operate a liquid propellant rocket is by Pressure Blowdown (PBD). A mode of operation where the propellant tanks are typically filled to 2/3 capacity with liquid and the last third is filled with pressurized gas. The pressurized gas is then used to drive the engine. Nexø I flew in this way.
Second up on complexity ladder comes Dynamic Pressure Regulation (DPR). In this mode there is no significant ullage in the propellant tanks, they are filled close to 100%. Instead a pressure tank with gas under very high pressure and a set of control valves are integrated into the system. This system can then supply the propellant tanks with feed pressure as the tanks are emptied. Nexø II will fly using such a system.
We’ve earlier tested a DPR system on our teststand with our BPM-5 rocket engine with good results. Here you can see a short video from one of our test burns:
-
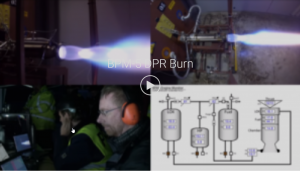
- BPM-5 DPR Burn
The DPR system on Nexø II is very similar to the system we know from the test stand, the main difference is the pressure tank. On the test stand it consist of two common diving bottles totaling 24 liters. Such diving bottles are obviously too heavy, so for Nexø II we purchased a 20 liter composite tank, which is approved for 300 bar. The tank itself weighs 12 kg.
Read more about Dynamic Pressure Regulation in this blog: Nexø II DPR
Capacitive level sensor for liquid oxygen.
To ensure correct filling of the LOX tank during launch preparations we have recently developed a capacitive level sensor calibrated for liquid oxygen. This will allow us to fill the LOX tank with a significantly higher accuracy than what was possible on Nexø I. More information on our inhouse developed capacitive level sensor is available in the video below.
-
- Building a Capacitive Liquid Oxygen Level Sensor
Expected flight performance
The primary consequence of the implementation of the DPR system is that Nexø II can have a higher filling ratio and better propellant efficiency than Nexø I. This means that Nexø II will have significantly more total impulse available. It is however also heavier.
With a GLOW if 292 kg and an effective thrust of 4500 N (10% lost to drag on jet vanes) Nexø II will accelerate at an initially modest 5.6 m/s^2 when leaving the launch tower. After 43 seconds of flight it will have depleted its propellants and reached a speed of 1280 km/h or Mach 1.14 at an altitude of 7 km. From here it will coast to apogee at 12.6 km. Upon descent it will deploy a ballute and parachute based landing system to land in the ocean.
Thus Nexø II is neither intended to set altitude or speed records. It is entirely a demonstrator vehicle that will hopefully show we are on track for implementing the same technology in the Spica rocket.
More videos:
-

- Nexø II debriefing part 1: Network and telemetry system
-

- Engine section and DPR section
-

- The onboard video on Nexø II
-

- DPR on Nexø II
-

- The main cable harness
-

- GPS and FIDO
-

- High-pressure test of the DPR system
-

- Calibration of the LOX sensor
-

- Tabletop ECU test
-

- Video Antenna on Nexø II
-

- DPR Water Flow Test
-

- The FIDO system
-

- Chinese Crap Camera
-

- Cold Soak Test
-

- The Launch Control Box
-

- Blue RIB
Dear Copenhagen Suborbitals guests
We'll get right to it: We need your help to run Copenhagen Suborbitals. This is a 100% non-profit project driven by sheer joy and hard work. We survive on donations averaging about $10, that we use to pay for raw materials, tools, our workshop, electricity and most importantly, rocket fuel. The entire CS team are unpaid volunteers, building rockets in our spare time. If this project brings you joy, please donate to keep it running. Thank you.
You can also donate via Paypal from our Support Us page


