It’s been a week since Flight Director Thomas Pedersen pressed the green button, commanding our Nexø 1 rocket to leave Sputnik. We have retrieved, analyzed and discussed data, and I would like to present the Guidance, Navigation and Control perspective here.
Recovery was a great success, since we managed to recover a booster for the first time. The nose cone also resurfaced so ironically, we managed to recover both ends of Nexø 1, while losing a part in the middle: The avionics compartment and main parachute section. The guidance and navigation computer (GNC) and its roommates are no longer among us.
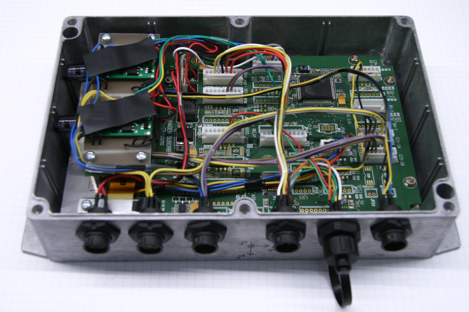
Nexø 1 GNC, now resting below 75 meters of water @ N55.034168 E15.601798
Guidance, Navigation and Control are three separate things:
Guidance is the task of determining the best target trajectory, from the current position onwards. This is complex if going into orbit, while our simple plan is to fly on a vertical line above Sputnik.
Navigation is the task of knowing where the rocket is and, equally important, exactly how it is oriented in space. The navigation system is purely inertial, and based on an Analog Devices iSensor IMU, located below two PCBs at to the left in the picture, so only its orange ribbon cable is visible. Inertial navigation is what you do when kidnapped, and driven away in the trunk of a car: Without other input, you try to remember the accelerations, braking, and turns, to decode where you are taken. This quickly becomes difficult, especially if the driver decides to go 3 times around a roundabout before exiting. For similar reasons, our inertial navigation system performs well on the way up, and then gradually loses accuracy, especially after apogee, when the rocket tends to first fall backwards, then tumble around before finally pointing nose down. This is completely acceptable because with jet vanes, we can only steer the rocket during the engine burn, i.e. the initial part of the ascent.
Control is the physical steering: Turning the rocket from the current orientation determined by Navigation, toward the one dictated by Guidance. We do this by jet vanes, which you can read more about here:
https://copenhagensuborbitals.com/news-from-the-bridge/
Due to the GNC’s deep diving adventure, every byte of data we have from it, is brought to you by our radio telemetry team. The rocket sends live data from onboard units to the ground, where they are received by a movable antenna setup, which is manually aimed at the rocket. While Nexø 1 was (regrettably) visible at apogee, this not normally the case, and the tracking operator is then guided by the pitch of a tone in headphones, indicating the current signal strength.
Tracking operator’s view. If you think Sputnik looks small, imagine tracking the rocket.
From T-5 until splashdown, the GNC delivered 4066 telemetry messages to the onboard telemetry transmitter. The receiver on Vostok did not miss one.
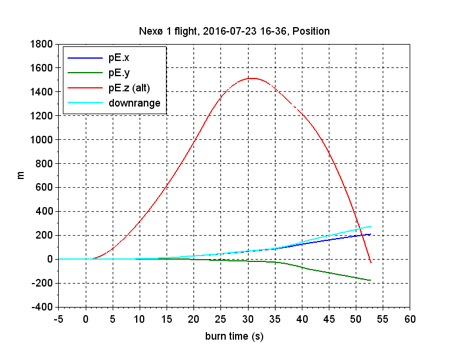
Nexø 1 position vs. time
As explained in the previous blog post, the BPM-5 engine shut down prematurely at T+21.8 s, due to heated oxygen supply – a mixture of LOX and GOX known as two-phase flow, starting at about T+6 s. We have since determined that this did not directly cause the shutdown, but the resulting lower chamber pressure caused an increased flow of Ethanol, which in turn caused Ethanol to run out prematurely. Theories of in-flight propellant leaks seemingly visible on video have been investigated, but these can be explained as sun reflection, or coincide with rocket falling backwards after apogee, through its self-produced oxygen cloud. Tank pressure readings do not support theories of any leak. The engine cut off before either tank pressure had dropped significantly, and the subsequent drop of ethanol tank pressure corresponds with Helium flowing through the injector after running out of ethanol, as we have seen earlier in static test with the very same injector.
Nexø 1 then flew to a 1514 m altitude (T+30.8), its maximum ascent speed was only 82 m/s.
SAPPHIRE, the predecessor of Nexø 1, launched in 2013 at an angle almost 3 degrees off vertical, and into significant wind, leading to an easily visible initial trajectory correction. On Nexø 1 launch day, wind and waves were exceptionally low, so it got a smooth trajectory start, just slightly more than 1 degree off vertical. Subjectively, it seemed to just fly straight, though telemetry shows it did make minor corrections
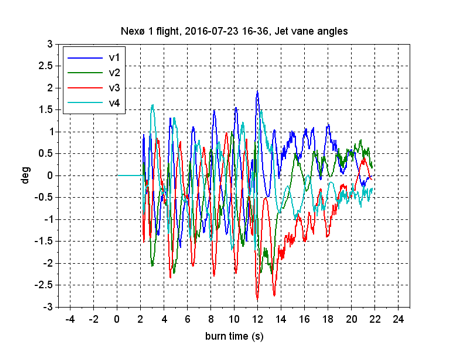
Nexø 1 flight, jet vane angles
Jet vane Control starts at 15 meter altitude, to ensure the rocket has cleared the tower before attempting to turn. Due to a modest 1.0g initial acceleration (which was expected), this is more than two seconds after the onset of the engine mainstage. Great weather conditions aside, Nexø 1 was comparatively harder to balance than SAPPHIRE, because the aerodynamic self-correction is weak at low speed. Many small corrections are seen until T+12. Nevertheless jet vanes deflect less than ±3 degrees out of ±14 available, so only a fraction of available steering power was used. We were very pleased to see this work.
All angles in the graph are defined positive in the direction producing a left-hand roll torque, and the apparent pairwise symmetry of the curves occur because opposing jet vanes deflect to opposite angles to produce steering force in the same direction.
The slightly negative average angle is due to a new feature: roll control, which kept the roll rate below an 8 deg/s average until MECO.
Descent phase
Though not normally considered a guidance task, parachute deployment is managed by the GNC, due its readily available navigation data. Nexø 1 parachute deployment is a 3-step process:
- Deploy the nose cone, leaving the ballute in free air (nominally shortly after apogee)
- Deploy the main parachute (nominally 3000 m)
- Deploy a back-up mechanism to push the main parachute out of its container, in case any mechanical failure has prevented it from deploying normally (nominally 20 sec after step 2)
The 82 m/s speed record did not stand long, since no parachutes deployed.
The reason for this was a combination of unfortunate events. Automatic deployment did not occur, because an otherwise sensible requirement is that the engine has first stopped, the event is known as Main Engine CutOff (MECO). The MECO detection criterion was originally either low chamber pressure, or lack of forward acceleration. The latter requirement was meaningful on SAPPHIRE, with its short powerful burn, but less so with Nexø 1, which was actually expected to lose speed during the last part of its engine burn, because thrust would not exceed the sum of gravity and drag forces. Thus, I removed the acceleration limit entirely, leaving only chamber pressure and a hard timeout.
This decision was ill-fated.
As explained above, the engine burn was shorter than expected. This caused the GNC to interpret the pressure drop at the end of the burn as a sensor failure, and replace the measurement with an estimate. This strategy has served us well before, when SAPPHIRE’s chamber pressure sensor failed shortly after liftoff. Since the estimated burn time was longer than the actual, this in turn postponed MECO detection.
Always well prepared for the battles we have lost, we had a backup parachute deployment trigger in place. When our Flight Director saw Nexø 1 coming down, he pressed the manual deployment buttons for the above 3 stages, in order. Regrettably, the first of the 3 commands was apparently never transmitted on the uplink radio, due to a combined hardware and software malfunction in the mission control panel. Like the LOX vent valve, this worked when tested, then failed when most needed. Deployment stages 2 and 3 followed and worked, but to no avail, since the nose cone was still on. Had any other than the first command failed, we would have had a ballute deployment, which at the very least would have bought us a lot more time.
Nexø 1 hit the water nose-first at 148 m/s (530 km/h, 331 mph)
In that perspective, we are very pleased to have the booster in our workshop today. Its autopsy will happen sometime next week, so stay tuned to see what else we learn in that process.





8 Comments
Arend Boer · 31st July 2016 at 10:20 am
In the graph “Nexo I position vs. time”, where does the light-blue line downrange stand for?
Flemming Nyboe · 31st July 2016 at 10:37 am
Hello Arend,
Downrange is the horizontal distance from Sputnik (vector sum of pE.x and pE.y).
Arend BOER · 31st July 2016 at 11:52 am
Why was it necessary to shift launching position just before take-off?
Is the current in the Baltic Sea so strong?
Flemming Nyboe · 2nd August 2016 at 8:04 pm
Hello Arend,
We let Sputnik drift with the current most of the time, and my impression from the radio communication was that they started and moved it, to ensure it remained close to the center of the ESD 139 naval training area booked for the launch.
saxman25 · 4th August 2016 at 12:02 pm
can’t you implement something like a “free fall detector” as a “hardcoded” parachute deploy signal? not electronical but mechanical?
something like a tube with some mercury in it that is at the bottom of the tube connecting two contacts, if there is upward accelleration. And when the apogee is reached and the rocket falls down, the mercury comes off the contacts?
or some gyroscope-wheel-attached something, that allways gets pulled down by earth’s gravity (or upward accelleration) and detects, if the angle of the surrounding rocket is too far off and triggers a mechanical deploy signal?
Flemming Nyboe · 4th August 2016 at 3:16 pm
Hello saxman,
We probably could, but actually no electronics failed. The detection criteria were unsuitable for the unexpected flight path, but can be changed to handle a scenario like this.
Regards, FlemmingF
Bender Bending Rodriguez · 9th August 2016 at 9:33 am
I love the work being done here, shame the avionics could not be recovered. Looks like you still got plenty of data though.
Speaking of avionics ever since sapphire you guys have been using little spiky antennas. I keep looking for something like it around the web but I can’t seem to find anything.
Do you make the antenna yourself?
Or is there somewhere I might find one?
Just Curious
GamiodrryNut · 2nd January 2023 at 11:57 am
de
intervalo
ventricular,
pulso,
bloqueo
Comments are closed.